The Cyber-Physical Systems (CPS) group specializes in advanced robotic and automation technologies, covering Digital and Physical Twins, Model-Based Systems Engineering, Collaborative Manipulators and Vehicles, and Advanced Robotic Systems Algorithms, for enabling the Digitalization for Industry 4.0 and Smart City 2.0. CPS works closely with its industry and government partners to research and develop innovative and robust solutions to enable and/or enhance more autonomous, resilient and collective robotic applications. Their work is applied across many sectors, including electronics, certification, building services, transportation and public services.
Key Technologies
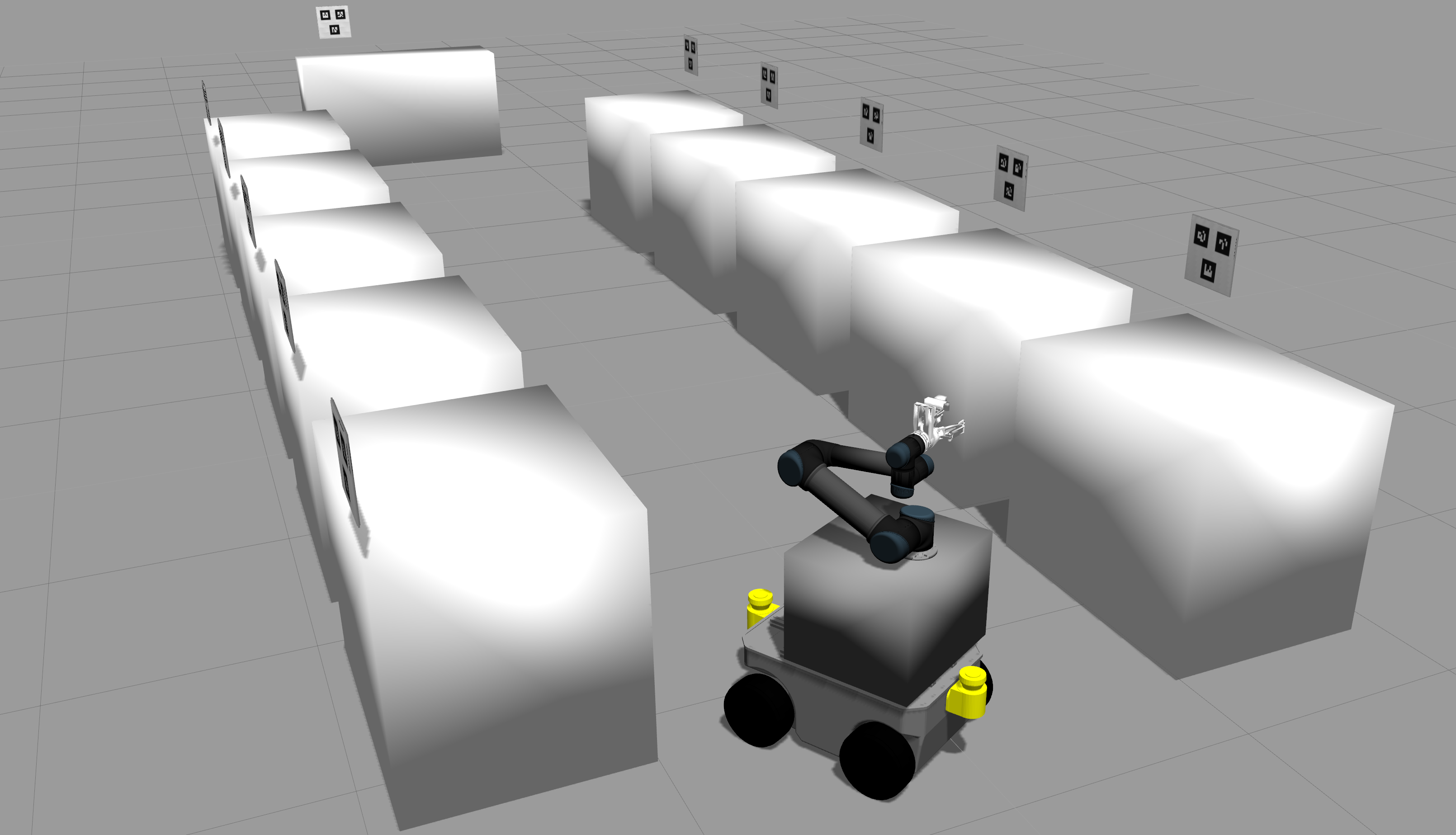
Collaborative Mobile Manipulator for Unmanned Factory
ASTRI has developed a more agile development approach for its industry partner to create Collaborative Mobile Manipulator and its Digital Twin by leveraging Model-Based Systems Engineering for enabling autonomous and collaborative operations in Unmanned Factory.
The Digital and Physical Twins approach adopted by ASTRI enables the engineering team to solicit and validate system requirements by using the using the digital twin earlier in the System Development Life Cycle (SDLC) and allows greater agility in handling future design changes. Thus, this results in reducing system integration time by and cutting the total cost of system development of the physical twin.
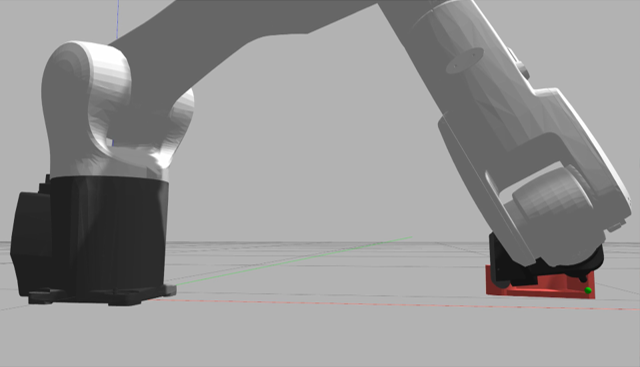
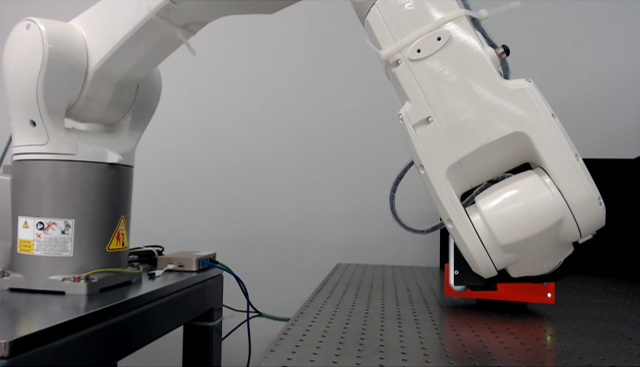
Robotic Manipulator for Resilient Operation
ASTRI has developed Digital and Physical Twins for robotic manipulator systems embedded with motion planning, computer vision and machine learning algorithms to enable autonomous and resilient operation in system production. Unlike the conventional approach, the system composed of subcomponents of robotic manipulator, computer vision and AI can be validated and modified separately or collectively at any stage in the System Development Life Cycle (SDLC) via Model/Software/Hardware-In-the-Loop Simulations. This ASTRI approach achieves not only realizing the seamless and agile system integration of robotic, vision and AI technologies but also minimizing complexity, cost and time in system production.